RESEARCH
With the most original and advanced technology,
we create new connections between people, machines, spaces, and information
Robot & Physical AI
Robotic technologies are researched to enable natural coexistence with humans in everyday spaces. By leveraging AI that learns a robot’s vision, behavior, and interaction, key technologies for robot popularization are developed through the integration of autonomous driving platforms and human interaction technologies.
-

AI for Robotics
Robots are trained to see, move, and communicate using AI, while cloud-based physical AI expands the ability of multiple robots to share intelligence.
-

Cloud Robotics
A proprietary cloud-based autonomous robot platform is developed, validated in diverse environments, and continuously enhanced for real-world services.
-

Human-Robot Interaction
HRI (Human-Robot Interaction) technologies are studied to improve user experience through optimal design, socially compliant navigation, and intuitive communication using expressions and lighting.
Vision & Spatial AI
Spatial AI technologies are researched to recognize and understand 3D spaces and interact with surrounding environments using AI-based vision. Foundational technologies are established to enable a wide range of spatial-based services.
-
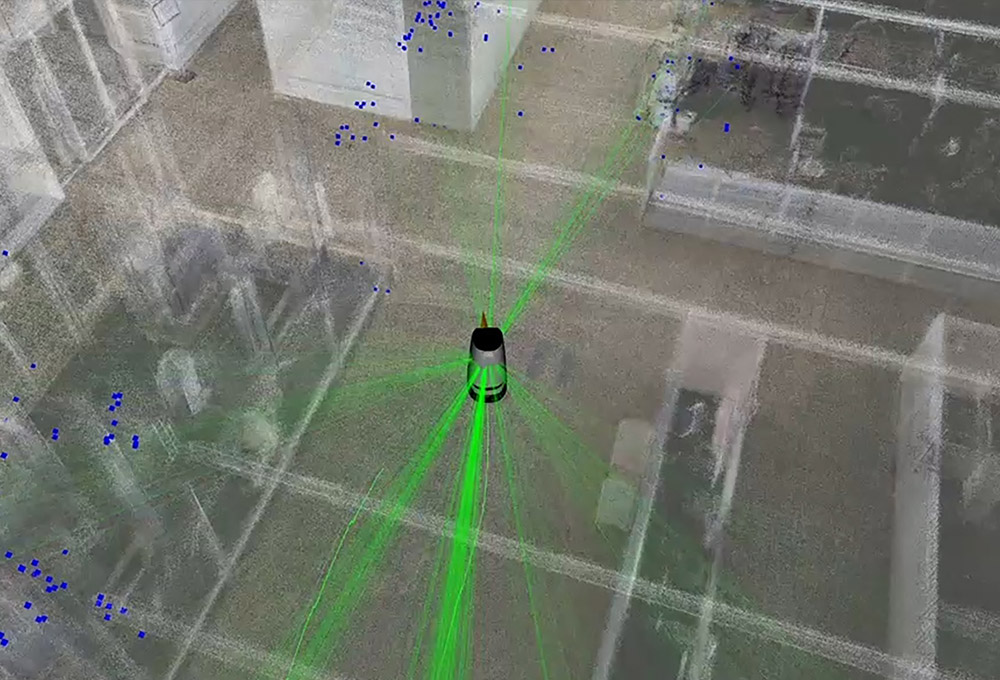
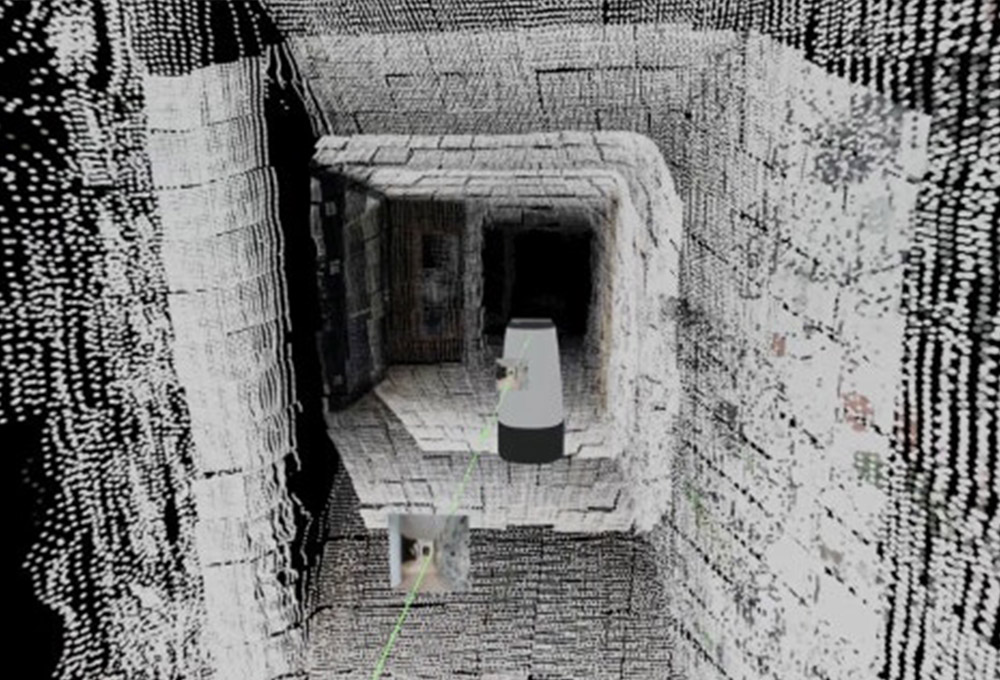
Mapping & Localization
Various spaces are accurately constructed in 3D using self-developed mapping robots and devices, alongside research on precise indoor and outdoor localization based on Vision AI.
-
Foundation Models for Spatial AI
Spatial AI technologies are explored using foundation models trained on large-scale 3D data, enabling robots to understand 3D spaces and people and perform diverse tasks.
-

Spatial AI for Enhanced User Experience
Technologies required for future spatial-based services—including Naver services, robotics, next-generation XR (AR, VR, MR), autonomous driving, and smart cities—are actively studied.
Platform & OS
Platforms, operating systems, and OS technologies are developed for multiple robotic services, enabling robots to function as a unified system across interconnected environments rather than as isolated machines.
-

Multi-Robot Intelligence System
A cloud-based intelligent platform is built to allow numerous robots to operate as a single, organically connected system.
-

Vision-Based Localization System
Robots and machines are supported in recognizing and understanding real-time locations within physical spaces through digital twin and vision AI technologies.
-

Web Platform-Based Robot OS
Highly scalable, developer-friendly OS architectures are built to simplify the development and deployment of robotic services in web-based environments.
Digital Twin
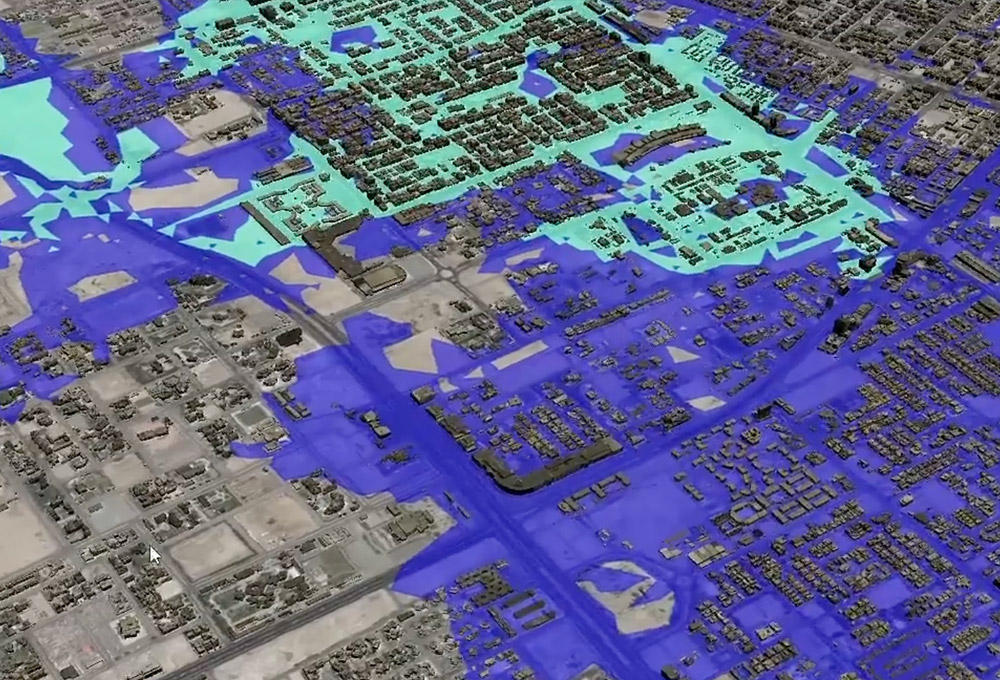
Digital twin technologies are researched to accurately replicate city-scale environments in digital form, with core technologies developed to construct 3D data for lanes, roads, buildings, and entire cities.
-

City-Scale 3D Modeling
Entire cities are rapidly and accurately implemented as 3D models using aerial imagery, AI-based mapping, and large-scale distributed processing technologies.
-

AI-Driven 3D Model Automation
Urban 3D models are enhanced in completeness and usability by restoring and generating areas that are difficult to verify through aerial imagery using AI.
-
Urban Scenario Simulation
A city-level digital twin platform is established to provide a foundation for simulating administrative operations, urban planning, disaster response, and other future services in virtual environments.